MPU-6050加速度-陀螺儀-溫度傳感器-micropython
tags: micropython mpu-6050

實驗目標:
MPU-6050 IMU(慣性測量單元)是一個 3 軸加速度計和 3 軸陀螺儀傳感器。加速度計測量重力加速度,陀螺儀測量旋轉速度。此外,該模塊還測量溫度。該傳感器非常適合確定移動物體的方向。
MPU-6050簡介
MPU-6050 是一個帶有 3 軸加速度計和 3 軸陀螺儀的模組。
陀螺儀-用於測量旋轉速度 (rad/s),這是角度位置沿 X、Y 和 Z 軸(滾動、俯仰和偏航)隨時間的變化。這使我們能夠確定物體的方向。
加速度計-測量加速度它可以感應重力 (9.8m/s2) 等靜態力或振動或運動等動態力。
MPU-6050 測量 X、Y 和 Z 軸上的加速度。理想情況下,在靜態物體中,Z 軸上的加速度等於重力,並且在 X 和 Y 軸上應為零。
加速度計-可以使用三角法計算橫滾角和俯仰角。但無法計算偏航。

接線

須匯入的程式庫
新開一個mpu6050.py和main.py放一起,並上傳到ESP32板上
程式碼
import machine
class accel():
def __init__(self, i2c, addr=0x68):
self.iic = i2c
self.addr = addr
self.iic.start()
self.iic.writeto(self.addr, bytearray([107, 0]))
self.iic.stop()
def get_raw_values(self):
self.iic.start()
a = self.iic.readfrom_mem(self.addr, 0x3B, 14)
self.iic.stop()
return a
def get_ints(self):
b = self.get_raw_values()
c = []
for i in b:
c.append(i)
return c
def bytes_toint(self, firstbyte, secondbyte):
if not firstbyte & 0x80:
return firstbyte << 8 | secondbyte
return - (((firstbyte ^ 255) << 8) | (secondbyte ^ 255) + 1)
def get_values(self):
raw_ints = self.get_raw_values()
vals = {}
vals["AcX"] = self.bytes_toint(raw_ints[0], raw_ints[1])
vals["AcY"] = self.bytes_toint(raw_ints[2], raw_ints[3])
vals["AcZ"] = self.bytes_toint(raw_ints[4], raw_ints[5])
vals["Tmp"] = self.bytes_toint(
raw_ints[6], raw_ints[7]) / 340.00 + 36.53
vals["GyX"] = self.bytes_toint(raw_ints[8], raw_ints[9])
vals["GyY"] = self.bytes_toint(raw_ints[10], raw_ints[11])
vals["GyZ"] = self.bytes_toint(raw_ints[12], raw_ints[13])
return vals # returned in range of Int16
# -32768 to 32767
def val_test(self): # ONLY FOR TESTING! Also, fast reading sometimes crashes IIC
from time import sleep
while 1:
print(self.get_values())
sleep(0.05)主程式1
from machine import Pin, I2C
from time import sleep
import mpu6050
i2c = I2C(scl=Pin(22), sda=Pin(21))
mpu = mpu6050.accel(i2c)
while True:
mpuVal = mpu.get_values()
print("GX:{:.1f}/ GY:{:.1f}/ GZ:{}".format(mpuVal['GyX'],mpuVal['GyY']\
,mpuVal['GyX']), mpuVal['GyZ'])
print("AX:{:.1f}/ AY:{:.1f}/ AZ:{:.1f}".format(mpuVal['AcX'],\
mpuVal['AcY'], mpuVal['AcZ']))
sleep(0.5)
print("-"*10)
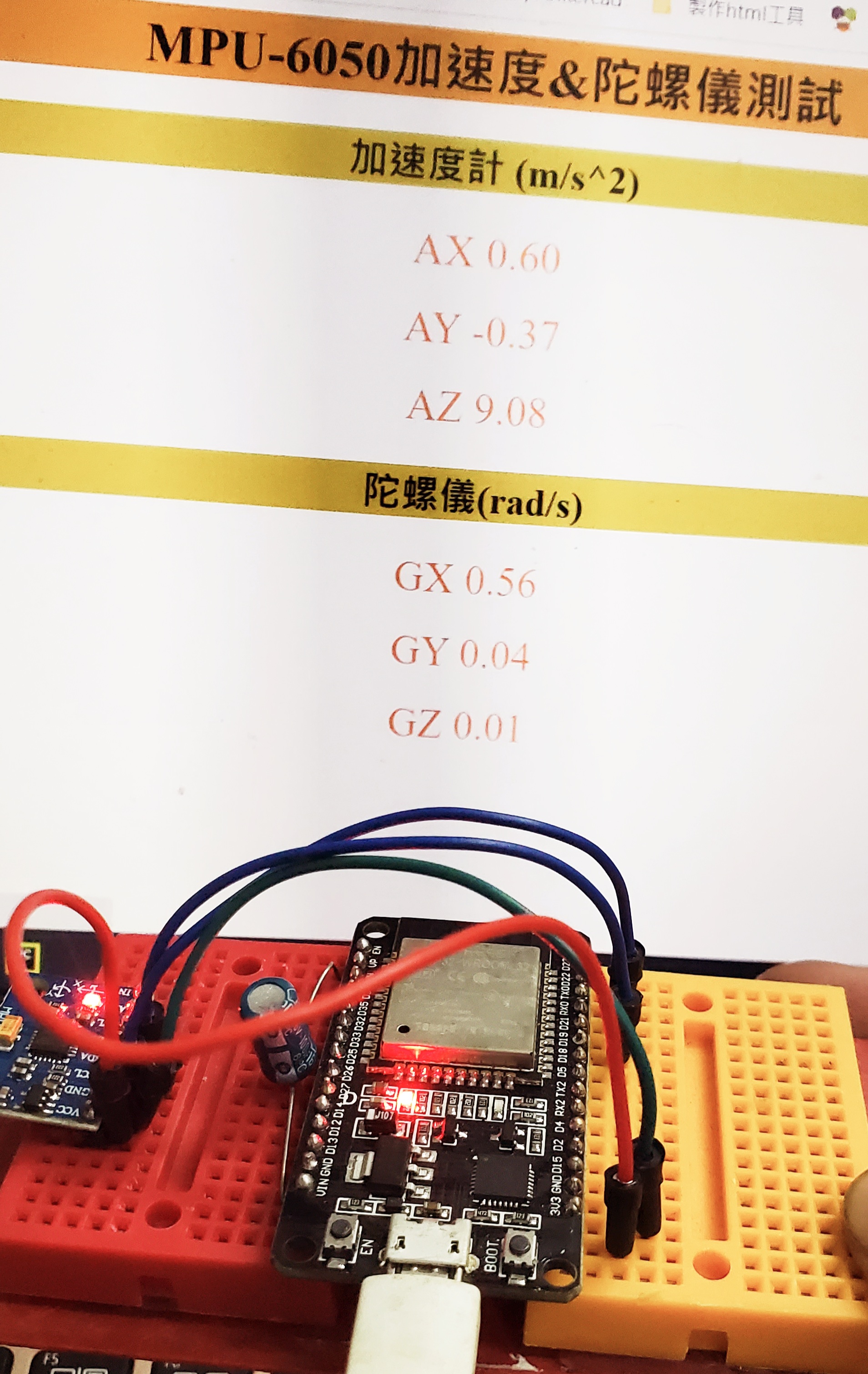
結果

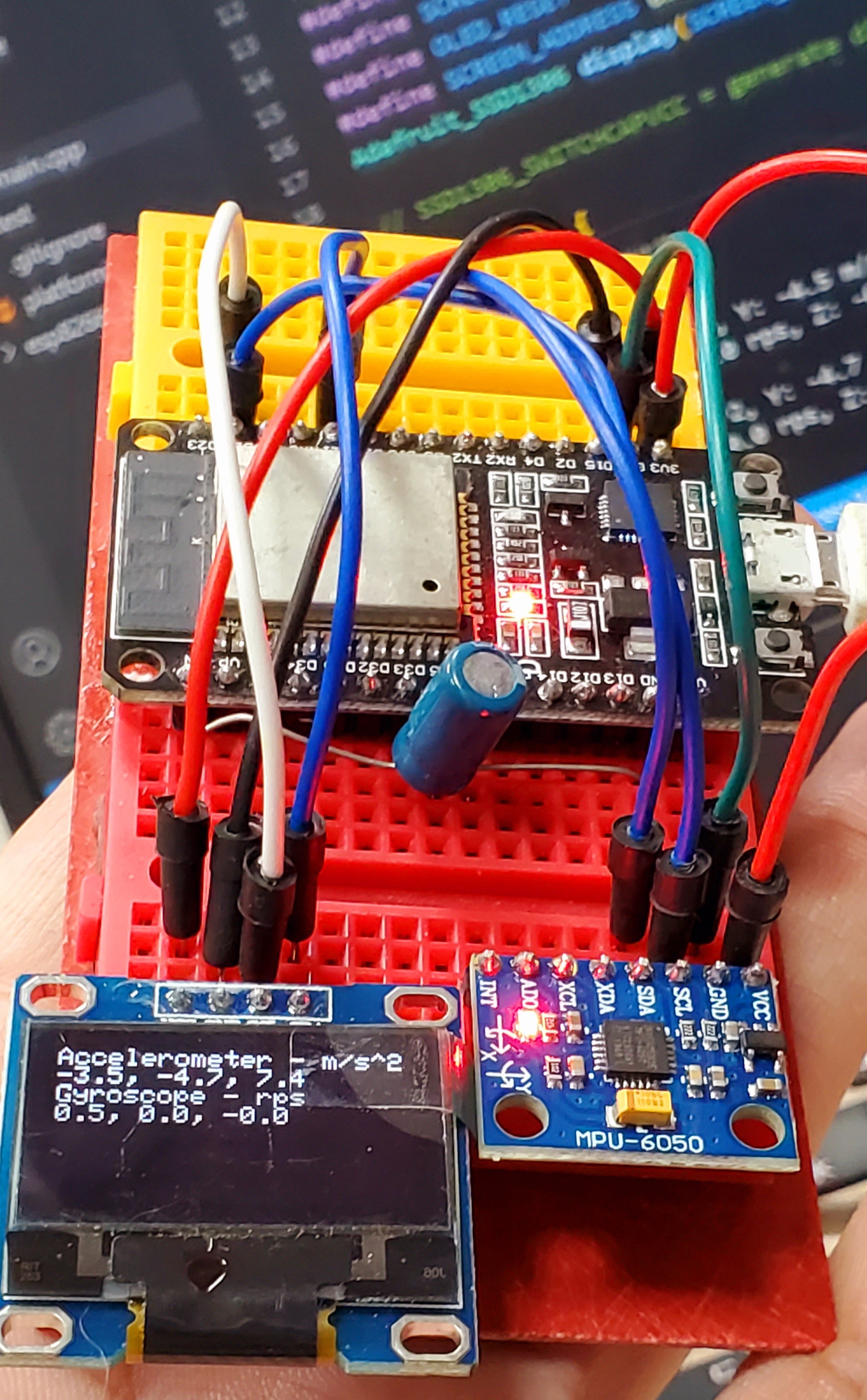
量測數值顯示於OLED
建立ssd1306.py函式庫並上傳到ESP32
主程式2
from machine import Pin, I2C
from time import sleep
import mpu6050
import ssd1306
i2c = I2C(scl=Pin(22), sda=Pin(21))
width=128 #oled高
height=64 #oled寛
oled=ssd1306.SSD1306_I2C(width, height, i2c) #賦予變數給設制好的ssd1306模組,並給予所須參數
oled.fill(0)
mpu = mpu6050.accel(i2c)
while True:
mpuVal = mpu.get_values()
print("GX:{:.1f}/ GY:{:.1f}/ GZ:{}".format(mpuVal['GyX'],mpuVal['GyY']\
,mpuVal['GyX']), mpuVal['GyZ'])
print("AX:{:.1f}/ AY:{:.1f}/ AZ:{:.1f}".format(mpuVal['AcX'],\
mpuVal['AcY'], mpuVal['AcZ']))
oled.text("GX:{:.1f}".format(mpuVal['GyX']), 0, 0, col=1)
oled.text("GY:{:.1f}".format(mpuVal['GyY']), 0, 10, col=1)
oled.text("GZ:{:.1f}".format(mpuVal['GyZ']), 0, 20, col=1)
oled.text("AX:{:.1f}".format(mpuVal['AcX']), 0, 30, col=1)
oled.text("AY:{:.1f}".format(mpuVal['AcY']), 0, 40, col=1)
oled.text("AZ:{:.1f}".format(mpuVal['AcZ']), 0, 50, col=1)
oled.show()
sleep(0.5)
oled.fill(0)
print("-"*10)結果2